Avoiding Over-Reliance on `mpsc` channels in Rust
•Shoutout to the folks over at /r/rust that helped guide some of the initial improvements in this post.
Introduction
Channels in Rust are a really powerful tool for allowing cross-thread communication. I have used them in just about every single project, professional and personal. They enable a message passing pattern between threads that is safe, efficient, and dare I say, fun. This is particularly the case when using Tokio mpsc channels and utils such as select!. They really allow you to design actor-based systems that are quite resilient to change while doing a good job at utilising the underlying hardware.
During a recent livestream, Jon Gjengset raised a point which stuck with me. There are situations were I might be over-relying on mpsc channels. Design solutions that typically resemble a fan-in pattern; having a large number of producers and a single consumer. When we have a relatively small and stable number of producers, this pattern works well.
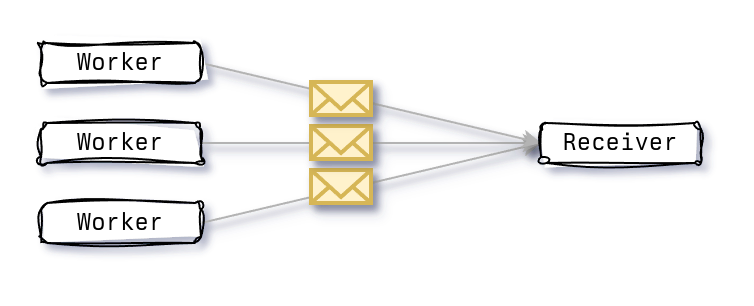
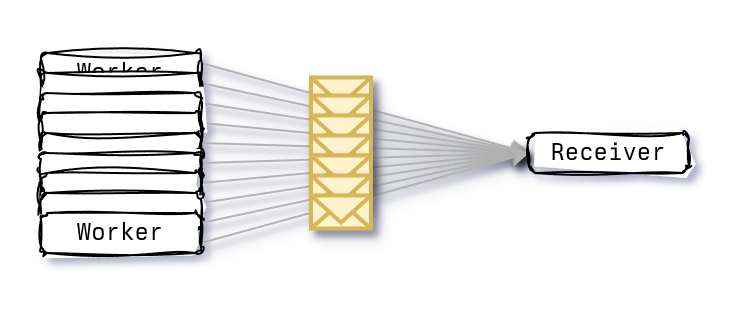
Significantly increasing the number of producers can lead to congestion on the consumer side, where the overhead of receiving and processing a message can lead to message backlog or messages being dropped. This is particularly dangerous when there is no backpressure and producers keep producing messages at a faster rate than the consumer can process them.
This post will explore an alternative method of enabling this fan-in pattern and explore its performance characteristics.
Baseline
Imagine a situation where we have a large burst of data that we need to quickly process and send to a streaming client. This is what we do with Have I Been Squatted?. You input a domain in the input box and we generate a large number of possible permutations. The permutations are then enriched with all sorts of data (e.g., geolocation, rdap/whois, server banners) and streamed back to you as quickly as possible.
As a baseline, we’ll have a simple socket server that listens to incoming tcp connections from a client. Think of this as a simple client-server connection.
loop
An actor client can be as simple as the following serial mpsc consumer.
// Wait for a message from one of our workers and send it to the server
loop
Using mpsc
Our first implementation for solving this problem can use an mpsc channel, where we have a single consumer, sending messages through the socket, and a large number of producers enriching some data. We name these actor and worker respectively.
pub async
pub async
Using Arc<Mutex<Vec<_>>>
An alternative approach is to instead rely on Arc<Mutex<Vec<_>>> to act as our buffer. The important aspects are the following:
- We must minimise allocations, so we pre-allocate two buffers which are swapped between the worker and actor.
- We must minimise contention so our critical sections are as small as possible.
- We avoid the use of tokio’s
Mutexin favour ofstd::sync::Mutex.
Starting with our worker, which will look very similar to the mpsc worker.
pub async
The actor is where things get interesting. We need to be able to swap the buffers between the worker and actor. This is done by using a std::sync::Mutex to lock the buffer and swap it with a new buffer. This is done in the critical section to avoid contention.
pub async
This has the benefit of consuming as many messages as possible in a single pass, improving the overall throughput.
Sidenote — impact of tokio::sync::Mutex versus std::sync::Mutex
The astute among you might notice the clippy::await_holding_lock above. This is because we are using std::sync::Mutex instead of tokio::sync::Mutex — this is fine as we are actually not holding the lock across an await point due to the explicit drop call. Initially I had used tokio::sync::Mutex; the performance was significantly worse. About ≈25x worse as you’ll see further on. You can find the profiling results in the appendix below.
This is a critical point to understand when using std::sync::Mutex in an async context, as it can lead to deadlocks if not handled correctly. As a rule of thumb, I always use std::sync::Mutex first, and only switch to tokio::sync::Mutex when absolutely necessary.
Results
Note — the server buffer size is set to 65536 bytes, high enough that it should not cause any backpressure on the client. These benchmarks were run on an AMD Ryzen 9 5900HS/NVIDIA 3080 with 32GB of memory.
Running a number of benchmarks provides us with some helpful insights. The graph below is in log scale, across benchmarks using mpsc, tokio’s Mutex, and std::sync::Mutex.
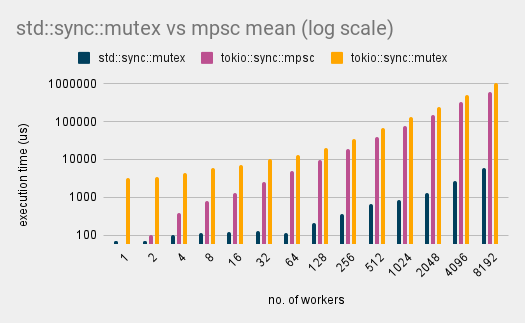
Results are in log scale, with the number of workers on the x-axis and the time taken in microseconds on the y-axis. Lower is better.
At very small numbers of workers, the std::sync::Mutex implementation is slower than the mpsc implementation. This is likely due to the overhead of the Mutex itself. As the number of workers increases, the std::sync::Mutex implementation quickly outperforms the mpsc implementation.
I added another benchmark using tokio’s Mutex to see how it would compare. The result trajectory was what I expected, but the magnitude was really surprising. Simply using the “wrong” mutex implementation can erase all performance gains.
Concluding thoughts
There are still a few more things to explore here. For starters, there are definitely some more optimisations to be had depending on the shape and size of our data. Another alternative is looking to remove Mutex entirely in favor of AtomicPtr. This would allow us to avoid the contention of the Mutex entirely but requires some more non-trivial engineering.
Additionally I would like to extend these benchmarks to include validation checks to make sure that each implementation is actually sending the number of messages it should be sending.
All the hacky code for this post can be found here. Feel free to extend it and improve on it with your findings.
If you have any thoughts or ideas on how to improve this, please let me know. I am always looking to learn more.
Appendix
Results
Results from the benchmarks from 2^1 to 2^13 workers. Values are in microseconds (μs). The delta is the percentage difference between the std::sync::Mutex and mpsc implementations.
| workers | std::sync::mutex | tokio::sync::mpsc | tokio::sync::mutex | %Δ |
|---|---|---|---|---|
| 1 | 67.795 | 57.78 | 3159.9 | -14.77% |
| 2 | 69.998 | 101.67 | 3500.4 | 45.25% |
| 4 | 103.49 | 394.86 | 4477.4 | 281.54% |
| 8 | 115.75 | 815.68 | 5988.5 | 604.69% |
| 16 | 117.54 | 1293.1 | 7336.6 | 1000.14% |
| 32 | 124.65 | 2511.6 | 10169 | 1914.92% |
| 64 | 114.49 | 4892.7 | 13300 | 4173.47% |
| 128 | 205.31 | 9850.9 | 20195 | 4698.06% |
| 256 | 367.57 | 19192 | 35342 | 5121.32% |
| 512 | 672.27 | 38542 | 68178 | 5633.11% |
| 1024 | 849.53 | 77073 | 132050 | 8972.43% |
| 2048 | 1279.4 | 148280 | 251470 | 11489.81% |
| 4096 | 2651.9 | 326080 | 513510 | 12196.09% |
| 8192 | 5778.9 | 618660 | 1075400 | 10605.50% |
Profiling
Profiling results using cargo flamegraph integrated with criterion. The top flamegraph is the std::sync::Mutex implementation, the bottom is the tokio::sync::Mutex implementation.